Flying Cars and National Parks
Submitted by brad on Tue, 2018-09-11 12:14
Topic:
Tags:




Yesterday I wrote about the future of group tourism and made reference to the tourist robocar.
Most of the world was wowed by the Google Duplex demo, where their system was able to cold-call a hairdresser and make an appointment with her, with the hairdresser unaware she was talking to an AI. The system included human speech mannerisms and the ability to respond to the random phrases the hairdresser through back.
The primary purpose of the city is transportation. Sure, we share infrastructure like sewers and power lines, but the real reason we live in dense cities is so we can have a short travel time to the things in our lives, be they jobs, friends, shopping or anything else.
Sometimes that trip is a walking one, and indeed only the dense city allows walking trips to be short and also interesting. The rest of the trips involve some technology, from the bicycle to the car to the train. All that is about to change.
Earlier I posted my gallery of CES gadgets, and included a photo of the eHang 184 from China, a "personal drone" able, in theory, to carry a person up to 100kg.

Whether the eHang is real or not, some version of the personal automated flying vehicle is coming, and it's not that far away. When I talk about robocars, I am often asked "what about flying cars?" and there will indeed be competition between them. There are a variety of factors that will affect that competition, and many other social effects not yet much discussed.
There are two visions of the flying car. The most common is VTOL -- vertical takeoff and landing -- something that may have no wheels at all because it's more a helicopter than a car or airplane. The recent revolution in automation and stability for multirotor helicopters -- better known as drones -- is making people wonder when we'll get one able to carry a person. Multirotors almost exclusively use electric motors because you must adjust speed very quickly to get stability and control. You also want the redundancy of multiple motors and power systems, so you can lose a rotor or a battery and still fly.
This creates a problem because electric batteries are heavy. It takes a lot of power to fly this way. Carrying more batteries means more weight -- and thus more power needed to carry the batteries. There are diminishing returns, and you can't get much speed, power or range before the batteries are dead. OK in a 3 kilo drone, not OK in a 150 kilo one.
Lots of people are experimenting with combining multirotor for takeoff and landing, and traditional "fixed wing" (standard airplane) designs to travel any distance. This is a great deal more efficient, but even so, still a challenge to do with batteries for long distance flight. Other ideas including using liquid fuels some way. Those include just using a regular liquid fuel motor to run a generator (not very efficient) or combining direct drive of a master propeller with fine-control electric drive of smaller propellers for the dynamic control needed.
Another interesting option is the autogyro, which looks like a helicopter but needs a small runway for takeoff.
Some "flying car" efforts have made airplanes whose wings fold up so they can drive on the road. These have never "taken off" -- they usually end up a compromise that is not a very good car or a very good plane. They need airports but you can keep driving from the airport. They are not, for now, autonomous.
Some want to fly most of their miles, and drive just short distances. Some other designs are mostly for driving, but have an ability to "short hop" via parasailing or autogyro flying when desired.
HBO released a new version of "Westworld" based on the old movie about a robot-based western theme park. The show hasn't excited me yet -- it repeats many of the old tropes on robots/AI becoming aware -- but I'm interested in the same thing the original talked about -- simulated experiences for entertainment.
The new show misses what's changed since the original. I think it's more likely they will build a world like this with a combination of VR, AI and specialty remotely controlled actuators rather than with independent self-contained robots.
 One can understand the appeal of presenting the simulation in a mostly real environment. But the advantages of the VR experience are many. In particular, with the top-quality, retinal resolution light-field VR we hope to see in the future, the big advantage is you don't need to make the physical things look real. You will have synthetic bodies, but they only have to feel right, and only just where you touch them. They don't have to look right. In particular, they can have cables coming out of them connecting them to external computing and power. You don't see the cables, nor the other manipulators that are keeping the cables out of your way (even briefly unplugging them) as you and they move.
One can understand the appeal of presenting the simulation in a mostly real environment. But the advantages of the VR experience are many. In particular, with the top-quality, retinal resolution light-field VR we hope to see in the future, the big advantage is you don't need to make the physical things look real. You will have synthetic bodies, but they only have to feel right, and only just where you touch them. They don't have to look right. In particular, they can have cables coming out of them connecting them to external computing and power. You don't see the cables, nor the other manipulators that are keeping the cables out of your way (even briefly unplugging them) as you and they move.
This is important to get data to the devices -- they are not robots as their control logic is elsewhere, though we will call them robots -- but even more important for power. Perhaps the most science fictional thing about most TV robots is that they can run for days on internal power. That's actually very hard.
The VR has to be much better than we have today, but it's not as much of a leap as the robots in the show. It needs to be at full retinal resolution (though only in the spot your eyes are looking) and it needs to be able to simulate the "light field" which means making the light from different distances converge correctly so you focus your eyes at those distances. It has to be lightweight enough that you forget you have it on. It has to have an amazing frame-rate and accuracy, and we are years from that. It would be nice if it were also untethered, but the option is also open for a tether which is suspended from the ceiling and constantly moved by manipulators so you never feel its weight or encounter it with your arms. (That might include short disconnections.) However, a tracking laser combined with wireless power could also do the trick to give us full bandwidth and full power without weight.
It's probably not possible to let you touch the area around your eyes and not feel a headset, but add a little SF magic and it might be reduced to feeling like a pair of glasses.
The advantages of this are huge:
In some cases, you need the player to "play along" and remember not to do things that would break the illusion. Don't try to run into that wall or swing from that light fixture. Most people would play along.
For a lot more money, you might some day be able to do something more like Westworld. That has its advantages too:
The latter experience will be made too, but it will be more static and cost a lot more money.
Warning: We're going to get a bit squicky here for some folks.
Westworld is on HBO, so of course there is sex, though mostly just a more advanced vision of the classic sex robot idea. I think that VR will change sex much sooner. In fact, there is already a small VR porn industry, and even some primitive haptic devices which tie into what's going on in the porn. I have not tried them but do not imagine them to be very sophisticated as yet, but that will change. Indeed, it will change to the point where porn of this sort becomes a substitute for prostitution, with some strong advantages over the real thing (including, of course, the questions of legality and exploitation of humans.)
Elon Musk likes to say pretty controversial things off the cuff, and so do I, but he inspired a number of threads by saying at Re:Code that there's a billion to one chance we're living in base reality. To use his word, this world is almost surely a "simulation."
This weekend I went to Pomona, CA for the 2015 DARPA Robotics Challenge which had robots (mostly humanoid) compete at a variety of disaster response and assistance tasks. This contest, a successor of sorts to the original DARPA Grand Challenge which changed the world by giving us robocars, got a fair bit of press, but a lot of it was around this video showing various robots falling down when doing the course:
What you don't hear in this video are the cries of sympathy from the crowd of thousands watching -- akin to when a figure skater might fall down -- or the cheers as each robot would complete a simple task to get a point. These cheers and sympathies were not just for the human team members, but in an anthropomorphic way for the robots themselves. Most of the public reaction to this video included declarations that one need not be too afraid of our future robot overlords just yet. It's probably better to watch the DARPA official video which has a little audience reaction.
Don't be fooled as well by the lesser-known fact that there was a lot of remote human tele-operation involved in the running of the course.
Check out my Gallery of Photos from the DARPA Robotics Challenge Finals.
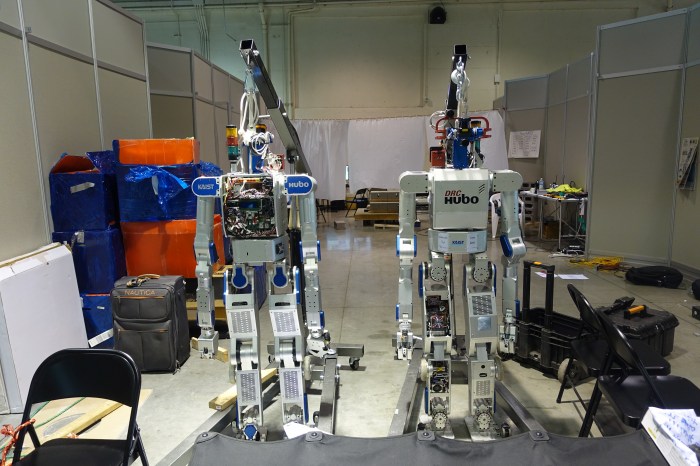
What you also don't see in this video is just how very far the robots have come since the first round of trials in December 2013. During those trials the amount of remote human operation was very high, and there weren't a lot of great fall videos because the robots had tethers that would catch them if they fell. (These robots are heavy and many took serious damage when falling, so almost all testing is done with a crane, hoist or tether able to catch the robot during the many falls which do occur.)
We aren't yet anywhere close to having robots that could do tasks like these autonomously, so for now the research is in making robots that can do tasks with more and more autonomy with higher level decisions made by remote humans. The tasks in the contest were:
The robots have an hour to do this, so they are often extremely slow, and yet to the surprise of most, the audience -- a crowd of thousands and thousands more online -- watched with fascination and cheering. Even when robots would take a step once a minute, or pause at a task for several minutes, or would get into a problem and spend 10 minutes getting fixed by humans as a penalty.
As some of you may know, I have been working as chair of computing and networking at Singularity University. The most rewarding part of that job is our ten week summer Graduate Studies Program. GSP15 will be our 7th year of it.
 In August, I attended the World Science Fiction Convention (WorldCon) in London. I did it while in Coeur D'Alene, Idaho by means of a remote Telepresence Robot(*). The WorldCon is half conference, half party, and I was fully involved -- telepresent there for around 10 hours a day for 3 days, attending sessions, asking questions, going to parties. Back in Idaho I was speaking at a local robotics conference, but I also attended a meeting back at the office using an identical device while I was there.
In August, I attended the World Science Fiction Convention (WorldCon) in London. I did it while in Coeur D'Alene, Idaho by means of a remote Telepresence Robot(*). The WorldCon is half conference, half party, and I was fully involved -- telepresent there for around 10 hours a day for 3 days, attending sessions, asking questions, going to parties. Back in Idaho I was speaking at a local robotics conference, but I also attended a meeting back at the office using an identical device while I was there.
I don't know who the person or people are who, under the name Satoshi Nakamoto, created the Bitcoin system. The creator(s) want to keep their privacy, and given the ideology behind Bitcoin, that's not too surprising.
There can only be 21 million bitcoins. It is commonly speculated that Satoshi did much of the early mining, and owns between 1 million and 1.5 million unspent bitcoins. Today, thanks in part to a speculative bubble, bitcoins are selling for $800, and have been north of $1,000. In other words, Satoshi has near a billion dollars worth of bitcoin. Many feel that this is not an unreasonable thing, that a great reward should go to Satoshi for creating such a useful system.
For Satoshi, the problem is that it's very difficult to spend more than a small portion of this block, possibly ever. Bitcoin addresses are generally anonymous, but all transactions are public. Things are a bit different for the first million bitcoins, which went only to the earliest adopters. People know those addresses, and the ones that remain unspent are commonly believed to be Satoshi's. If Satoshi starts spending them in any serious volume, it will be noticed and will be news.
Whether Bitcoin becomes a stable currency in the future or not, today few would deny it is not stable, and undergoing speculative bubbles. Some think that because nothing backs the value of bitcoins, it will never become stable, but others are optimistic. Regardless of that, today the value of a bitcoin is fragile. The news that "Satoshi is selling his bitcoins!" would trigger panic selling, and that's bad news in any bubble.
 If Satoshi could sell, it is hard to work out exactly when the time to sell would be. Bitcoin has several possible long term fates:
If Satoshi could sell, it is hard to work out exactly when the time to sell would be. Bitcoin has several possible long term fates:
My personal prediction is #3 -- that several successor currencies will arise which fix issues with Bitcoin, with exchange possible for a while. However, just as bitcoins had their sudden rushes and bubbles, so will this exchange rate, and as momentum moves into this currency it could move very fast. Unlike exchanges that trade bitcoins for dollars, inter-cryptocurrency exchanges will be fast (though the settlement times of the currencies will slow things down.) It could be even worse if the word got out that "Satoshi is trading his coins for [Foo]Coin" as that could cause complete collapse of Bitcoin.
Perhaps he could move some coins through randomizing services that scramble the identity association, but moving the early coins to such a system would be seen as selling them.
It's been a while since I've done a major new article on long-term consequences of Robocars. For some time I've been puzzling over just how our urban spaces will change because of robocars. There are a lot of unanswered questions, and many things could go both ways. I have been calling for urban planners to start researching the consequences of robocars and modifying their own plans based on this.

(Of late I have been writing a few articles for some other online sites.
For years I have posed the following question at parties and salons:
By the 25th century, who will be the household names of the 20th century?
My top contender, Armstrong, has died today. I pick him because the best known name of the 15th century is probably Columbus, also known as the first explorer to a major location -- even though he probably wasn't the actual first.
A month ago I hosted Vernor Vinge for a Bay Area trip. This included my interview with Vinge at Google on his career and also a special talk that evening at Singularity University. In the 1980s, Vinge coined the term "the singularity" even though Ray Kurzweil has become the more public face of the concept of late.
Vernor Vinge is perhaps the greatest writer of hard SF and computer-related SF today. He has won 5 Hugo awards, including 3 in a row for best novel (nobody has done 4 in a row) and his novels have inspired many real technologies in cyberspace, augmented reality and more.
It's been interesting to see how TV shows from the 60s and 70s are being made available in HDTV formats. I've watched a few of Classic Star Trek, where they not only rescanned the old film at better resolution, but also created new computer graphics to replace the old 60s-era opticals. (Oddly, because the relative budget for these graphics is small, some of the graphics look a bit cheesy in a different way, even though much higher in technical quality.)
The earliest TV was shot live. My mother was a TV star in the 50s and 60s, but this was before videotape was cheap. Her shows all were done live, and the only recording was a Kinescope -- a film shot off the TV monitor. These kinneys are low quality and often blown out. The higher budget shows were all shot and edited on film, and can all be turned into HD. Then broadcast quality videotape got cheap enough that cheaper shows, and then even expensive shows began being shot on it. This period will be known in the future as a strange resolution "dark ages" when the quality of the recordings dropped. No doubt they will find today's HD recordings low-res as well, and many productions are now being shot on "4K" cameras which have about 8 megapixels.
But I predict the future holds a surprise for us. We can't do it yet, but I imagine software will arise that will be able to take old, low quality videos and turn them into some thing better. They will do this by actually modeling the scenes that were shot to create higher-resolution images and models of all the things which appear in the scene. In order to do this, it will be necessary that everything move. Either it has to move (as people do) or the camera must pan over it. In some cases having multiple camera views may help.
When an object moves against a video camera, it is possible to capture a static image of it in sub-pixel resolution. That's because the multiple frames can be combined to generate more information than is visible in any one frame. A video taken with a low-res camera that slowly pans over an object (in both dimensions) can produce a hi-res still. In addition, for most TV shows, a variety of production stills are also taken at high resolution, and from a variety of angles. They are taken for publicity, and also for continuity. If these exist, it makes the situation even easier.
Not much new to report after the second game of the Watson Jeopardy Challenge. I've added a few updates to yesterday's post on Watson and the result was as expected, though Watson struggled a lot more in this game than in the prior round, deciding not to answer many questions due to low confidence and making a few mistakes. In a few cases it was saved by not buzzing fast enough even though it had over 50% confidence, as it would have answered slightly wrong.
The computer scientist world is abuzz with the game show world over the showdown between IBM's "Watson" question-answering system and the best human players to play the game Jeopardy. The first game has been shown, with a crushing victory by Watson (in spite of a tie after the first half of the game.)
Tomorrow's outcome is not in doubt. IBM would not have declared itself ready for the contest without being confident it would win, and they wouldn't be putting all the advertising out about the contest if they had lost. What's interesting is how they did it and what else they will be able to do with it.
Dealing with a general question has long been one of the hard problems in AI research. Watson isn't quite there yet but it's managed a great deal with a combination of algorithmic parsing and understanding combined with machine learning based on prior Jeopardy games. That's a must because Jeopardy "answers" (clues) are often written in obfuscated styles, with puns and many idioms, exactly the sorts of things most natural language systems have had a very hard time with.
Watson's problem is almost all understanding the question. Looking up obscure facts is not nearly so hard if you have a copy of Wikipedia and other databases on hand, particularly one parsed with other state-of-the-art natural language systems, which is what I presume they have. In fact, one would predict that Watson would do the best on the hardest $2,000 questions because these are usually hard because they refer to obscure knowledge, not because it is harder to understand the question. I expect that an evaluation of its results may show that its performance on hard questions is not much worse than on easy ones. (The main thing that would make easy questions easier would be the large number of articles in its database confirming the answer, and presumably boosting its confidence in its answer.) However, my intuition may be wrong here, in that most of Watson's problems came on the high-value questions.
It's confidence is important. If it does not feel confident it doesn't buzz in. And it has a serious advantage at buzzing in, since you can't buzz in right away on this game, and if you're an encyclopedia like the two human champions and Watson, buzzing in is a large part of the game. In fact, a fairer game, which Watson might not do as well at, would involve randomly choosing which of the players who buzz in in the first few tenths of a second gets to answer the question, eliminating any reaction time advantage. Watson gets the questions as text, which is also a bit unfair, unless it is given them one word a time at human reading speed. It could do OCR on the screen but chances are it would read faster than the humans. It's confidence numbers and results are extremely impressive. One reason it doesn't buzz in is that even with 3,000 cores it takes 2-6 seconds to answer a question.
Indeed a totally fair contest would not have buzzing in time competition at all, and just allow all players who buzz in to answer an get or lose points based on their answer. (Answers would need to be in parallel.)
Watson's coders know by now that they probably should have coded it to receive wrong answers from other contestants. In one instance it repeated a wrong answer, and in another case it said "What is Leg?" after Jennings had incorrectly answered "What is missing an arm?" in a question about an Olympic athlete. The host declared that right, but the judges reversed that saying that it would be right if a human who was following up the wrong answer said it, but was a wrong answer without that context. This was edited out. Also edited out were 4 crashes by Watson that made the game take 4 hours instead of 30 minutes.
It did not happen in what aired so far, but in the trials, another error I saw Watson make was declining to answer a request to be more specific on an answer. Watson was programmed to give minimalist answers, which often the host will accept as correct, so why take a risk. If the host doesn't think you said enough he asks for a more specific answer. Watson sometimes said "I can be no more specific." From a pure gameplay standpoint, that's like saying, "I admit I am wrong." For points, one should say the best longer phrase containing the one-word answer, because it just might be right. Though it has a larger chance of looking really stupid -- see below for thoughts on that.
The shows also contain total love-fest pieces about IBM which make me amazed that IBM is not listed as a sponsor for the shows, other than perhaps in the name "The IBM Challenge." I am sure Jeopardy is getting great ratings (just having their two champs back would do that on its own but this will be even more) but I have to wonder if any other money is flowing.
Watson doesn't really understand the Jeopardy clues, at least not as a human does. Like so many AI breakthroughs, this result comes from figuring out another way to attack the problem different from the method humans use. As a result, Watson sometimes puts out answers that are nonsense "idiot" answers from a human perspective. They cut back a lot on this by only having it answer when it has 50% confidence or higher, and in fact for most of its answers it has very impressive confidence numbers. But sometimes it gives such an answer. To the consternation of the Watson team, it did this on the Final Jeopardy clue, where it answered "Toronto" in the category "U.S. Cities."
There are many fields that people expect robotics to change in the consumer space. I write regularly about transportation, and many feel that robots to assist the elderly will be the other big field. The first successful consumer robot (outside of entertainment) was the Roomba, a house cleaning robot. So I've often wondered about how far we are from a robot that can tidy up the house. People got excited with a PR2 robot was programmed to fold towels.
This is a hard problem because it seems such a robot needs to do general object recognition and manipulation, something we're pretty far from doing. Special purpose household chore robots, like the Roomba, might appear first. (A gutter cleaner is already on the market.)
Recently I was pondering what we might do with a robot that is able to pick up objects gently, but isn't that good at recognizing them. Such a robot might not identify the objects, but it could photograph them, and put them in bins. The members of the household could then go to their computers and see a visual catalog of all the things that have been put away, and an indicator of where it was put. This would make it easy to find objects.
The catalog could trivially be sorted by when the items were put away, which might well make it easy to browse for something put away recently. But the fact that we can't do general object recognition does not mean we can't do a lot of useful things with photographs and sensor readings (including precise weight and other factors) beyond that. One could certainly search by colour, by general size and shape, and by weight and other characteristics like rigidity. The item could be photographed in a 360 view by being spun on a table or in the grasping arm, or which a rotating camera. It could also be laser-scanned or 3D photographed with new cheap 3D camera techniques.
When looking for a specific object, one could find it by drawing a sketch of the object -- software is already able to find photos that are similar to a sketch. But more is possible. Typing in the name of what you're looking for could bring up the results of a web image search on that string, and you could find a photo of a similar object, and then ask the object search engine to find photos of objects that are similar. While ideally the object was photographed from all angles, there are already many comparison algorithms that survive scaling and rotation to match up objects.
The result would be a fairly workable search engine for the objects of your life that were picked up by the robot. I suspect that you could quickly find your item and learn just exactly where it was.
Certain types of objects could be recognized by the robot, such as books, papers and magazines. For those, bar-codes could be read, or printing could be scanned with OCR. Books might be shelved at random in the library but be easily found. Papers might be hard to manipulate but could at least be stacked, possibly with small divider sheets inserted between them with numbers on them, so that you could look for the top page of any collected group of papers and be told, "it's under divider 20 in the stack of papers."